A une semaine de la sortie du règlement 2017, il est temps de faire un bilan de 2016.
En résumé, notre saison 2016 a été l' une des moins bonnes depuis 2010.
Pourtant tout avait bien commencé. Le règlement présente des aspects intéressants, la dune, les châteaux de sable, les poissons. Les cabines, bof, les coquillages nuls. Lors de notre première conférence Skype:
La dune? Faut tout prendre en une fois.
Le périmètre? Cela passe....
On le fait.
La préparation des robots
Les actions sont réparties:
Au petit robot, le petit tas en face de la zone de départ, les cabines, les poissons, les coquilages
Au gros, la prise de la totalité de la dune et, éventuellement, le gros tas.
Nous planifions trois regroupements de toute l' équipe:
Début novembre, fabrication de la piste "parisienne" (à Villemoisson)

Mi-janvier premiers tests à Villemoisson
Et à Tourcoing début mars.
Fin mars le gros robot ramassait la dune:
Il nous manquait un programme d' homologation, il est réalisé mi-avril:
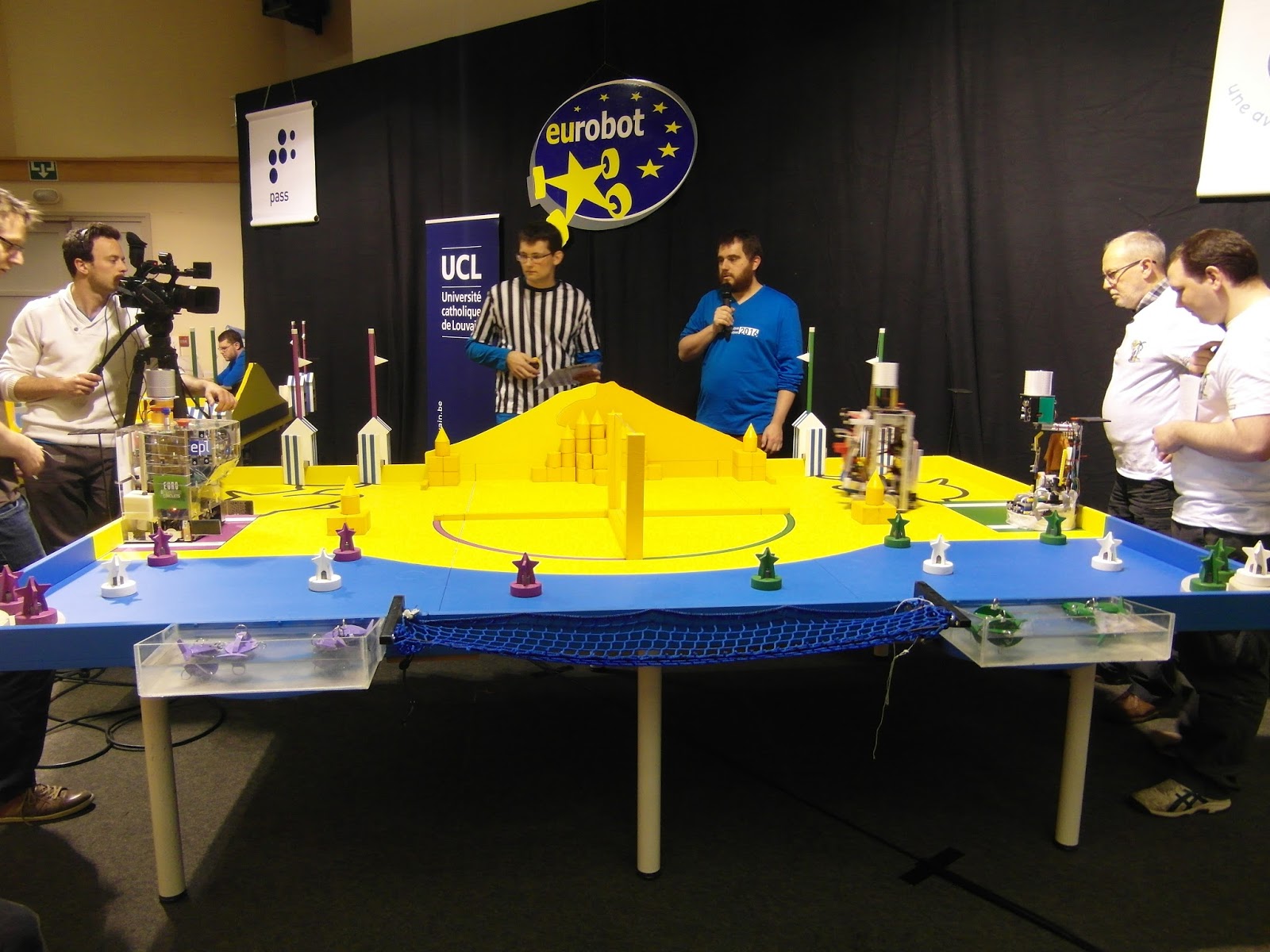
La Coupe de Belgique
Elle se déroule à l UCL de Louvain la Neuve près de Bruxelles. Comme à l' habitude l' accueil y est chaleureux l' ambiance très sympathique. Aux premiers essais, une casse matérielle sur le petit robot nous oblige à le reprogrammer partiellement. Puis au test de prise de dune, nous constatons que les cubes sont beaucoup plus lourds que prévu. Le robot pique du nez quand il prend la dune, et les roues motrices tournent dans le vide.Pour les trois premiers matches nous utilisons le programme d' homologation. Pour les deux suivants, les tentatives de ramasser la totalité de la dune se soldent par un échec. Nous échouons à la porte des 1/4 de finale à un point près.
La Coupe de France
Elle à lieu cette année à La Roche sur Yon pour la première fois. Le point (très) positif est qu' elle ai effectivement eu lieu. Pour le reste, on sent bien que l' organisation est encore à roder. Les stands sont un peu petit, surtout quand on est neuf. Heureusement le stand voisin (RCVA) est le plus souvent inoccupé.
A la suite de l' expérience de la Coupe de Belgique, les robots ont été modifiés. J' ai ajouté 1,5 kg de lest à l' arrière du gros robot pour le stabiliser.
Premier match:
Le gros robot prend la dune en entier et la soulève. Mais l' un des cubes traîne sur la piste, ce qui est normalement sans grande conséquence, sauf que les panneaux de la piste on un décalage vertical de quelques millimètres (dans le mauvais sens). Le robot reste bloqué avec la dune dans les bras.
Deuxième match:
La tension est montée d' un cran, toute l' équipe est particulèrement stressée. Une erreur dans le choix des couleurs au démarrage, et les deux robots de bloqent mutuellement: zéro point marqué.
Pour la suite:
Tout va de mal en pis. Malgré les efforts de toute l' équipe, le gros robot ne prendra jamais la dune, et le petit qui devait assurer avec les poissons n' en prendra aucun.
Bilan de la Coupe:
Nous finissons 83èmes avec 265 points. (A oublier)
La Coupe d' Ile de France.
Bien décidé à ne pas rester sur cet échec, j' inscris l' équipe à la Coupe d' Ile de France. J' ai corrigé le système de pinces pour gagner quelques millimètres de tolérance, et installé un pointeur laser pour améliorer la précision de la position de départ. Le petit robot n' étant pas disponible, Nicolas en a construit un à la hâte avec un Arduino et sans asservissement.La compétition se déroule à l' Electrolab de Nanterre. L' ambiance y est très sympathique, et l' organisation est aux petits soins pour les équipes. Malgré quelques matches ratés à cause des dimensions des cubes et de la piste (C' était ceux de La Roche sur Yon) enfin, le gros robot prend, et dépose, la dune tandis que le petit pousse son tas, et déroule son parasol.
Perspectives 2017
Il est sûr que nous éviterons de refaire les mêmes erreurs, en particulier celle qui consiste à tout miser sur une action audacieuse et spectaculaire qui dépend (trop) de la dimensions des pistes et des éléments de jeu. De toute évidence, les menuisiers de La Roche sur Yon ne sont pas ceux de La Ferté Bernard, ni ceux de Belgique. Il serait souhaitable que Planète Sciences maîtrise mieux la fabrication des pistes, c' est un élément essentiel de la qualité de la compétition et donc du spectacle.Pour Cybernétique en Nord, le petit robot sera probablement le même qu' en 2016. Par contre le projet de gros robot devrait aboutir pour 2017.
Le chassis sera de même dimensions, mais avec l' intérieur dégagé au maximun. La morisation fera appel à des moteurs "brushless" extra plats et plus puissants, commandés par une électronique spécifique. Les codeurs à magnéto-résistance, montés de façon originale, devraient nous fournir près 100 000 impulsions par mètre. Nous en attendons une vitesse maximale de l' ordre de 2m/s et une accélération s' approchant de 10 m/s2, le tout dans un coût "modéré".
Plus de détail dans la suite de ce blog.
Un grand merci à tous nos sponsors, sans lesquels tout ceci ne serait pas possible, avec une mention spéciale à RS et VICATRONIC pour leurs remises substancielles, à Free Fruit Agence pour le poster et Partenaire N°1 pour le local.
Bernard Gérardy



